|
The MAUVE Toolchain
|
|
The MAUVE Toolchain
|
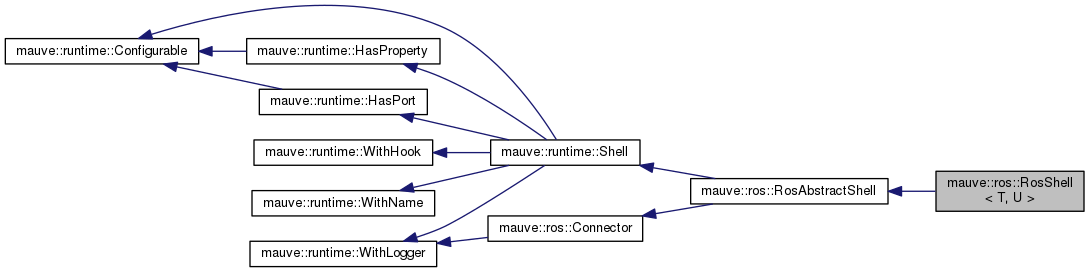
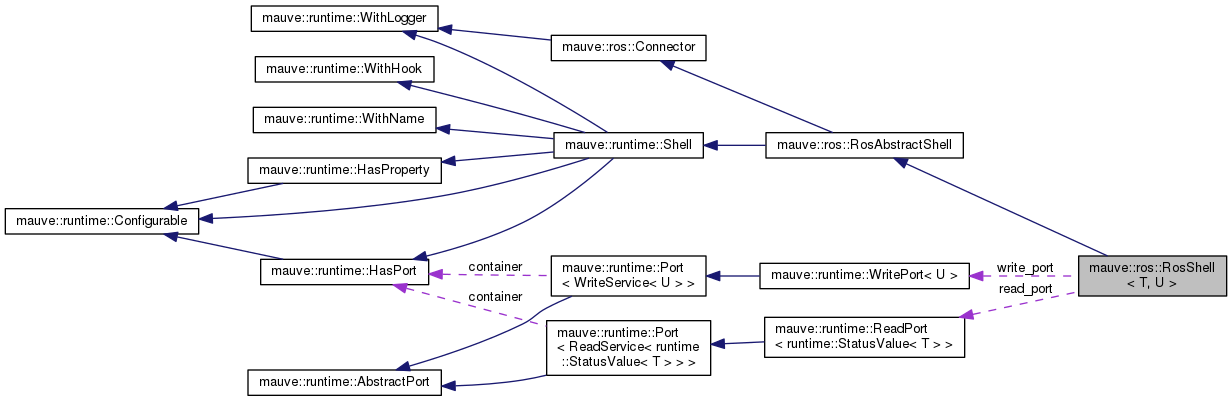
ROS Shell for conversion. More...
#include <Shell.hpp>
Public Types | |
| using | conversion_t = std::function< bool(const T &, U &)> |
| Type of the conversion functions. | |
Public Member Functions | |
| RosShell () | |
| Default constructor. | |
| RosShell (const std::string &topic) | |
| Constructor with topic. More... | |
| RosShell (const conversion_t &convert) | |
| Constructor with conversion. More... | |
| RosShell (const std::string &topic, const conversion_t &convert) | |
| Constructor with conversion and topic. More... | |
| virtual bool | configure_hook () |
| Configure shell: init ROS node. | |
 Public Member Functions inherited from mauve::runtime::Shell Public Member Functions inherited from mauve::runtime::Shell | |
| Shell (const Shell &shell)=delete | |
| Copy constructor. More... | |
| void | cleanup () overridefinal |
| Cleanup the object. | |
| bool | configure () overridefinal |
| Configure the object. | |
| bool | is_configured () const overridefinal |
| Get the configuration status of the configurable object. More... | |
| AbstractLogger & | logger () const override |
| Get the logger. | |
| virtual std::string | name () const overridefinal |
| Get Component name. | |
| void | print_model (std::ostream &out) const |
| Print the Shell model. More... | |
| std::string | type_name () const |
| Get the Shell type name. More... | |
| Public Member Functions inherited from mauve::runtime::HasProperty | |
| const std::vector< AbstractProperty * > | get_properties () const |
| Get the properties of the shell. More... | |
| std::size_t | get_properties_size () const |
| AbstractProperty * | get_property (std::string const &name) const |
| AbstractProperty * | get_property (int index) const |
| Public Member Functions inherited from mauve::runtime::HasPort | |
| void | disconnect () |
| AbstractPort * | get_port (std::string const &name) const |
| AbstractPort * | get_port (int index) const |
| const std::vector< AbstractPort * > | get_ports () const |
| Get the ports of the shell. More... | |
| std::size_t | get_ports_size () const |
| Public Member Functions inherited from mauve::ros::Connector | |
| bool | init () |
| Initialize ROS Node. | |
Public Attributes | |
| runtime::Property< conversion_t > & | conversion |
| Conversion function property. More... | |
| runtime::ReadPort< runtime::StatusValue< T > > & | read_port |
| Read port for the publisher component. More... | |
| runtime::WritePort< U > & | write_port |
| Write port for the subscriber component. More... | |
| Public Attributes inherited from mauve::ros::RosAbstractShell | |
| runtime::Property< std::string > & | topic = mk_property<std::string>("topic", "") |
| Topic property. | |
Additional Inherited Members | |
| Static Public Attributes inherited from mauve::ros::Connector | |
| ::ros::NodeHandle * | node |
| An handle to the ROS node. | |
| ::ros::NodeHandle * | node_private |
| An handle to the private view of the ROS node. | |
| Protected Member Functions inherited from mauve::runtime::Shell | |
| Shell () | |
| Default constructor. More... | |
| virtual | ~Shell () noexcept |
| Default destructor. More... | |
| Protected Member Functions inherited from mauve::runtime::HasProperty | |
| template<typename T > | |
| Property< T > & | mk_property (std::string const &name, T init_value) |
| Create a new property. More... | |
| Protected Member Functions inherited from mauve::runtime::HasPort | |
| template<typename R , typename... P> | |
| CallPort< R, P... > | mk_call_port (std::string const &name, R default_value) |
| EventPort & | mk_event_port (std::string const &name) |
| template<typename PORT , typename... PARAM> | |
| PORT & | mk_port (std::string const &name, PARAM...parameters) |
| Create a new port in this shell. More... | |
| template<typename T > | |
| ReadPort< T > & | mk_read_port (std::string const &name, T default_value) |
| template<typename T > | |
| WritePort< T > & | mk_write_port (std::string const &name) |
| Protected Member Functions inherited from mauve::runtime::WithHook | |
| virtual void | cleanup_hook () |
| Hook function called when cleaning the shell. More... | |
ROS Shell for conversion.
| T | MAUVE Type |
| ROS_T | ROS Type |
|
inline |
Constructor with topic.
| topic | topic to subscribe to |
|
inline |
Constructor with conversion.
| convert | conversion function |
|
inline |
Constructor with conversion and topic.
| convert | conversion function |
| topic | topic to subscribe to |
| runtime::Property<conversion_t>& mauve::ros::RosShell< T, U >::conversion |
Conversion function property.
| runtime::ReadPort<runtime::StatusValue<T> >& mauve::ros::RosShell< T, U >::read_port |
Read port for the publisher component.
| runtime::WritePort<U>& mauve::ros::RosShell< T, U >::write_port |
Write port for the subscriber component.
 1.8.11
1.8.11 
